Radio Paradise
![]() Juste cette page pour vous présenter la radio Internet Radio Paradise (ou RP) https://radioparadise.com qui vaut vraiment le détour (en tout cas pour mes goûts de bientôt cinquantenaire, amateur entre bien d'autres, de Marc Seberg et des Waterboys 😉) avec les caractéristiques suivantes :
Juste cette page pour vous présenter la radio Internet Radio Paradise (ou RP) https://radioparadise.com qui vaut vraiment le détour (en tout cas pour mes goûts de bientôt cinquantenaire, amateur entre bien d'autres, de Marc Seberg et des Waterboys 😉) avec les caractéristiques suivantes :
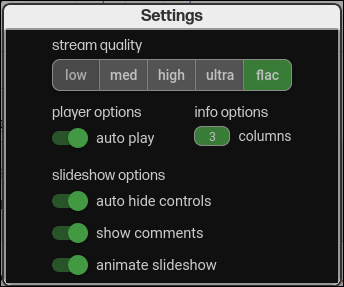
- Streaming de qualité optimale proposée au format FLAC (utile si écoute sur une chaîne hifi sinon la qualité High avec un bitrate de 128k est suffisante) mais aussi sous d'autres selon sa connexion (voir capture ci-contre).
- Pas de publicité, juste quelques coupures d'autopromo de temps en temps qui n'ont vraiment rien d'envahissant.
- Une application ordiphone sous Android minimaliste mais très efficace : sobre et fonctionnel. Affichage des pochettes d'album ou diaporama. Accès aux paroles, page Wikipédia, possibilité de laisser son évaluation du morceau écouté sous forme de note (de 1 à 10).
-
- Si un morceau ne nous plaît pas, on peut avancer au suivant (pas de retour en arrière par contre).
- On peut consulter l'historique des morceaux passés précédemment (utile pour retrouver un titre ou un artiste).
- Liste de nos chansons favorites avec réglage du curseur de notation exportable.
- Une possibilité de synchronisation de tous ses appareils avec le même compte.
- 4 chaînes différentes permettant aussi bien de redécouvrir des "classiques" que de faire des découvertes :
- Radio Paradise Main mix : la plus "généraliste"
- Radio Paradise Mellow Mix
- Radio Paradise Rock Mix
- Radio Paradise World/Etc Mix
- Une 5e chaîne "Mes favoris" pour écouter les morceaux que nous avons évalués (excellent pour retrouver et ré-écouter les morceaux qui nous ont plu). Attention, il faut avoir évalué au moins 100 morceaux pour y avoir accès.
- Page des différents liens de streaming : https://radioparadise.com/listen/stream-links
- Un paiement (don) laissé à la discrétion de chacun⋅e, selon ses moyens, sa satisfaction, ... https://payments.radioparadise.com/rp2s-content.php?name=Support&file=support
- L'application pour ordiphone est très simple mais efficace : je n'écoute quasiment que via ce biais là. Toutes les info sont sur le site dans l'onglet "Listen".
J'en ai profité aussi pour l'intégrer dans ma solution domotique basé sur Home Assistant et qui commande ma chaîne Yamaha RX-V677 : https://lofurol.fr/joomla/electronique/domotique/257-home-assistant-quelques-reglages-utiles
Une autre description de Radio Paradise sur linuxfr.org : https://linuxfr.org/news/a-la-re-decouverte-de-radio-paradise
Bref, un site à recommander et à soutenir !!!
LibreOffice : Macros, sécurité, activation, programmation
![]() Je conçois pas mal de fichiers LibreOffice dans lesquels il y a des macros permettant d'automatiser certaines tâches répétitives qui n'existent pas à l'origine. Pour cela, j'utilise le langage de programmation OOoBasic mais on peut aussi utiliser le Python (entre autres).
Je conçois pas mal de fichiers LibreOffice dans lesquels il y a des macros permettant d'automatiser certaines tâches répétitives qui n'existent pas à l'origine. Pour cela, j'utilise le langage de programmation OOoBasic mais on peut aussi utiliser le Python (entre autres).
Les macros (ou scripts) sont des sous-programmes qui peuvent être potentiellement dangereux pour votre système à cause de puissantes commandes permettant à LibreOffice d'interagir avec votre ordinateur : on peut imaginer un effacement, la transmission de données à notre insu, ...
Du coup, il faut être extrêmement prudent⋅e lorsqu'on exécute un fichier contenant des macros car tout le monde n'est malheureusement pas bien intentionné.
[Ubuntu] Impression d'étiquettes et de cartes avec gLabels et LibreOffice Calc
![]()
![]() Il existe une version plus récente de cette documentation sur cette page : https://forge.apps.education.fr/thierrym/glabels-creation-cartes-etiquettes
Il existe une version plus récente de cette documentation sur cette page : https://forge.apps.education.fr/thierrym/glabels-creation-cartes-etiquettes
Pour imprimer des étiquettes et des cartes, on peut utiliser LibreOffice mais il existe une application beaucoup plus puissante qu'on ne trouve que sous GNU/Linux qui est gLabels. Elle permet entre autre d'imprimer directement des codes barres (utile pour une gestion de bibliothèque par exemple) avec beaucoup de formats supportés (EAN, UPC, CODE39, CODE 128 et ISBN).
Le problème que l'on peut rencontrer avec gLabels, c'est un manque de modèles pour certaines imprimantes ou étiqueteuses. Par contre, rien n'empêche de les créer.
L'autre limitation est que l'impression ne peut se faire qu'en recto. Pour le verso, il faudra bidouiller soit en créant 2 fichiers (un pour le recto et un autre pour le verso) ou en se servant du paramètre d'impression permettant de n'imprimer que les pages impaires (odd) ou paires (even en anglais) avec un fichier .csv dans lequel on a inséré des lignes spécifiques pour le verso (ça peut se faire par macro dans LibreOffice mais ça demande là d'autres compétences).
Si l'on veut des verso simples à obtenir on pourra se tourner vers les projets CartesMD ou CréaCartes hébergés sur la Forge des Communs Numériques Éducatifs proposée par l'Éducation nationale.
Remarques :
- Même si le projet est âgé (datant d'avant 2010) et qu'il n'évolue pas trop, ne vous y trompez pas, il est toujours aussi performant et fonctionnel. Je n'ai pas trouvé aujourd'hui d'équivalent en terme de souplesse et de personnalisation aussi poussée, tout en évitant les lignes de codes même s'il peut demander une certaine technicité pour générer les fichiers .csv avec LibreOffice.
- Sous GNU/Linux, gLabels est le seul logiciel qui m'a permis d’imprimer des étiquettes une par une à partir de l’imprimante d’étiquettes LabelWriter 450 Duo de Dymo.
Liens utiles :
- Site officiel : https://glabels.org/ cette page ne semble plus accessible et renvoie désormais sur cette page Github : https://github.com/jimevins/glabels-qt
- https://doc.ubuntu-fr.org/glabels
- Page concernant les codes barres pour une bibliothèque (site de Anne-Marie CUBAT sur PMB) : http://amcubat.be/docpmb/codes-barres-concepts-base
- Tutoriel complet : https://help.gnome.org/users/glabels/stable/index.html.fr
- Autre tutoriel (en anglais) : https://blog.worldlabel.com/2010/getting-started-with-glabels-labels-cards-gnulinux.html et avec la seconde partie en usage plus avancé : https://blog.worldlabel.com/2010/advanced-usage-with-glabels-labelscards-linuxgnu.html
- Ci-dessous en pièce jointe un tutoriel pdf pour générer des étiquettes avec des codes barres pour PMB.
Possibilités avancées à partir d'un fichier .csv :
[FreeCAD] Réaliser des tampons encreurs avec Inkscape
Pour le scrapbooking mais pas seulement, il peut être intéressant de fabriquer ses propres tampons. L'idée est de réaliser le motif à l'aide d'Inkscape et ensuite d'incorporer le fichier .svg obtenu dans FreeCAD pour générer le fichier .stl à imprimer.
Sources :
- Incorporer un fichier SVG dans FreeCAD : https://wiki.freecad.org/Import_text_and_geometry_from_Inkscape/fr
- Créer des tampons à la découpeuse laser : https://ressources.labomedia.org/tampon_laser
I- Travail dans Inkscape
- Préparer son texte : le mettre sur un chemin par exemple via le menu Texte → Mettre suivant un chemin.
- Puis convertir le texte en chemin via le menu Chemin → Objet en chemin (ou raccourci Maj+Ctrl+C).
- Séparer en sous-chemins toutes les parties du texte via le menu Chemin → Séparer (ou raccourci Maj+Ctrl+K).
- Ajuster la taille pour qu'elle corresponde à la taille du tampon (plus facile à réaliser à ce stade que dans FreeCAD).
- Faire une rotation pour que ça corresponde au sens voulu (horizontale par exemple).
- Faire une symétrie axiale "Retourner horizontalement" (raccourci H) pour lire de droite à gauche (le tampon est inversé par rapport au résultat final).
- Aller dans le menu Fichier → Propriétés du document... (ou raccourci Maj+Ctrl+D) et cliquer sur le bouton "Ajuster la taille de la page au contenu" pour réduire la taille juste aux lettres.
- Enregistrer au format .SVG Simple.
- Conseils : pour un résultat optimal, ne pas faire des motifs ni trop fins ni trop petits, bien marquer les séparations entre les différentes parties.
II- Travail dans FreeCAD
[OpenSCAD] Informations utiles
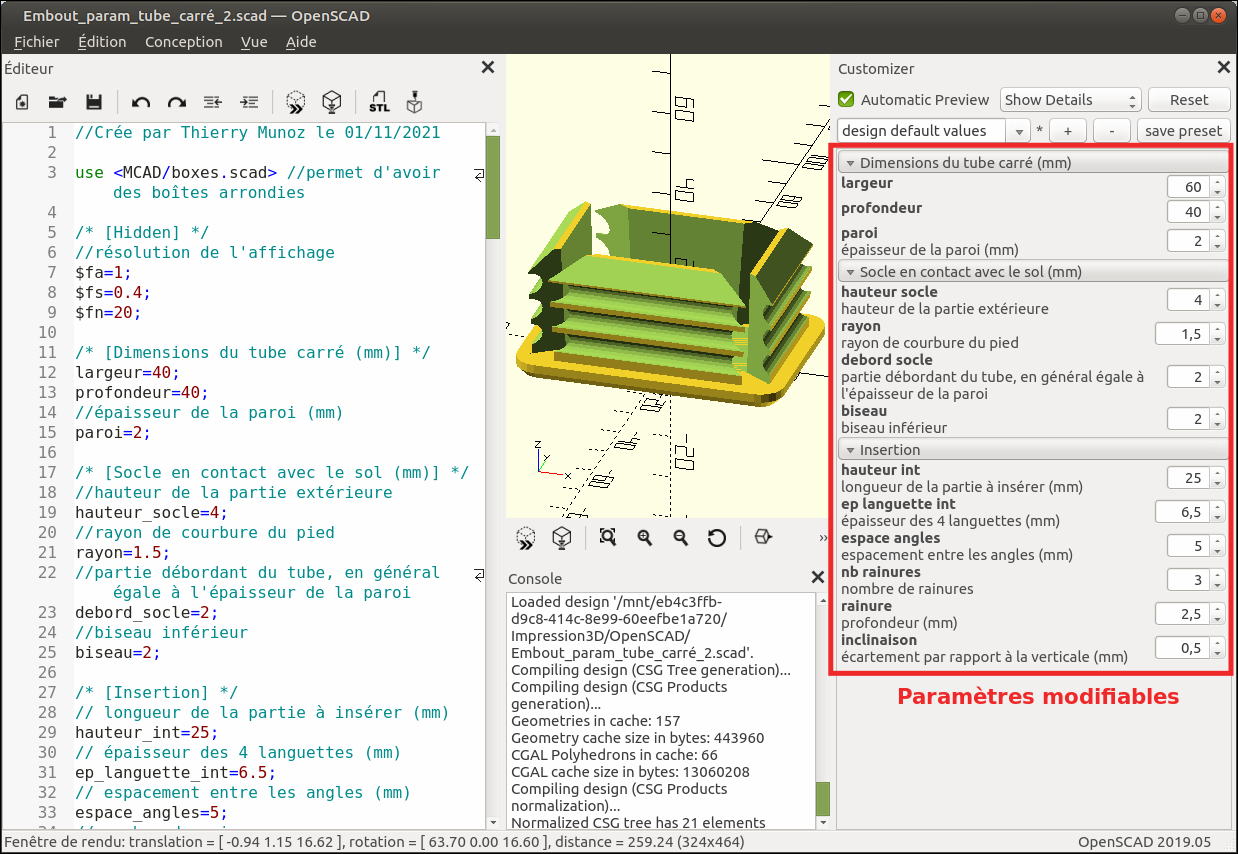
![]() OpenSCAD est un logiciel libre permettant de concevoir des objets en 3 dimensions par programmation (contrairement à FreeCAD).
OpenSCAD est un logiciel libre permettant de concevoir des objets en 3 dimensions par programmation (contrairement à FreeCAD).
Un de ses principaux avantages est de pouvoir personnaliser (customiser) les dimensions de l'objet de façon très facile afin de pouvoir l'adapter. Ça peut être utile par exemple pour des embouts de tubes. Je joins ci-dessous un fichier permettant de générer des embouts à insérer dans des tubes carrés ou rectangulaires.
Pages utiles :
- https://openscad.org/
- https://static.fablab-lannion.org/tutos/openscad/ : diaporama en français très complet
- https://rudi.giot.eu/Tutorials/files/OpenScad.pdf : très bon tutoriel pdf en français
- http://edutechwiki.unige.ch/fr/Tutoriel_OpenSCAD : wiki en français
- https://en.wikibooks.org/wiki/OpenSCAD_User_Manual/Customizer
- http://edutechwiki.unige.ch/fr/Tutoriel_OpenSCAD
- Pour forcer l'affichage des décimales, on rajoute après le point virgule ce commentaire : // 0.01 (ici on force l'affichage sur 2 décimales)
ProfondeurExtraInsert = 1; // 0.01 - Pour afficher les étapes en montrant les différentes pièces ajoutées ou soustraites, il faut rajouter des caractères spéciaux devant l'instruction qu'on souhaite voir :
- dièse (#) -> forme en rouge
- pour-cent (%) -> forme en transparence
- point-d’exclamation (!) -> seule cette forme est affichée
- étoile (*) -> forme invisible
- Lorsqu'on a des formes compliquées, on peut les préparer dans des modules pour ensuite les appeler lorsqu'on les utilisera. Ça permet de réduire les imbrications de fonctions.
- Pour afficher la valeur des variables dans la console, on utilise la fonction "echo".
Fichiers paramétriques utiles :
- Fabriquer des rondelles ou des O ring en plastique souple (TPU) pour des joints d’étanchéité dans ce projet https://www.thingiverse.com/thing:3953156 avec un fichier OpenSCAD à télécharger.
- Pour fabriquer des objets avec des filetages (vis et écrous par exemple) :
[SQLPage] Commandes utiles - Astuces
SQLPage est une application permettant de publier des bases de données sur une page Web sans se préoccuper de la mise en forme. Elle est développée et partagée par Ophir Lojkine (un grand merci à lui !!!).
Site officiel : https://sql-page.com.
Voir cette page où je décris son installation sur un NAS Synology : [SQLPage] Utilisation sur un NAS Synology avec Docker et MySQL
Projet École Inclusive : https://github.com/DSMejantel/Ecole_inclusive
Projet Carnet de Rucher : https://github.com/DSMejantel/Carnet-de-Rucher
Je liste ci-dessous des info pour aide-mémoire.
Sauf mention contraire, on part du principe qu'on travaille sur des bases SQLite.
[SQLPage] Utilisation sur un NAS Synology avec Docker et MySQL/PostgreSQL/SQLite
SQLPage est une application permettant de publier des bases de données sur une page Web sans se préoccuper de la mise en forme. Elle est développée et partagée par Ophir Lojkine (un grand merci à lui !!!).
Site officiel : https://sql-page.com
J'ai découvert SQLPage via ces articles très détaillés sur le site "linuxfr.org" :
- présentation par l'auteur lui-même : https://linuxfr.org/news/ecrire-une-appli-web-en-une-journee-avec-sqlpage
- un retour d'expérience par un enseignant ayant développé l'application "École Inclusive" à partir de SQLPage : https://linuxfr.org/news/ecole-inclusive-une-application-libre-pour-la-prise-en-charge-des-eleves-en-situation-de-handicap
C'est un outil très intéressant et puissant que je teste sur mon NAS Synology DS713+ sous DSM 7.1 (mon modèle trop ancien, qui a plus de 10 ans mais fonctionne impeccablement, ne peut pas migrer vers la version 7.2). Vous trouverez ci-dessous mon retour d'expérience.
Page 8 sur 41